| 00:02 | all right. Good morning. Um today we gonna do on started discussion |
|
| 00:11 | new topic girl, which is So, um, so far, |
|
| 00:17 | been talking about, um, designing Victor's on in general, trying to |
|
| 00:25 | how we build an ability to recognise , certainly in the context of |
|
| 00:33 | but also the context of trying to some of the objects of similar |
|
| 00:39 | So one of the other, open problems that has a very broad |
|
| 00:47 | of applications is tracking in tracking. could be relevant to, you |
|
| 00:53 | essentially detection. And, um, at how a particular object might, |
|
| 01:02 | know, move in space and time given observation. So tracking has multiple |
|
| 01:11 | . It's essentially trying to locate Ah, that potentially of interest to |
|
| 01:17 | . Of course, identifying what those might be can be part of the |
|
| 01:21 | problem. But the other aspect is actually deter mined the dynamic configuration, |
|
| 01:28 | is how the object is actually moving changing positions over time. Eyes critical |
|
| 01:36 | addressing the tracking problem. In a , it's ah, the glint of |
|
| 01:41 | Teoh follow something with their eyes. . That object goes very able to |
|
| 01:48 | it and track it. Ah, off all the challenges that might be |
|
| 01:58 | in the context of seems realization when the objects might actually appear really partially |
|
| 02:05 | the scene or the might be similar other objects. Eso can be |
|
| 02:11 | toe, identify and recognise a particular and so on. So far, |
|
| 02:16 | we'll look at each one of these to talk a little bit more about |
|
| 02:20 | problem. So here's an example off tracking, and what you see is |
|
| 02:27 | a bounding contour around the object appear tracking. In this case, a |
|
| 02:34 | , says the person who was in scene, our corn to responded and |
|
| 02:39 | able to localize the sort of the toe, the outline off the |
|
| 02:47 | And in a way, you can of this problem as saying that you |
|
| 02:51 | , we are tracking the center object object being start off as one |
|
| 02:58 | or we can also think of this you say, Well, I'm really |
|
| 03:03 | tracking the boundary. The boundary is up of multiple points, and each |
|
| 03:09 | is something that I'm actually being able match, that it's Ah, changing |
|
| 03:16 | over time, right? So, , a a very abstract sense. |
|
| 03:24 | is really about looking at a position evolving its position with tiny right. |
|
| 03:32 | , as I said, there are broad range of applications for tracking. |
|
| 03:38 | can be thought of as a low Albert of them, if you |
|
| 03:41 | for many other applications. Things like computer interaction. Right. So these |
|
| 03:48 | , um, you know, you our that was, in the context |
|
| 03:54 | augmented reality. You're essentially embedding real into a virtual world, if you |
|
| 04:01 | , in order to I understand how real object is exchanging and essentially be |
|
| 04:07 | to model that in the virtual We need to be able to track |
|
| 04:11 | geologic on DNA. In most the tracking is happening with respect to |
|
| 04:18 | riel objects in the scene. great example of this, you |
|
| 04:23 | that came about a few years back when Microsoft introduced the connect, |
|
| 04:30 | So the connector has two types of . If you know it's actually got |
|
| 04:35 | infrared sensor along with an infrared great on then, of course, got |
|
| 04:42 | visual sense in Israel. A visual on what it allows want to |
|
| 04:48 | Is this to essentially track of person based on their movements? It's able |
|
| 04:59 | sort of allow for interaction in a world. A game, if you |
|
| 05:07 | . It would be one example. was ah, beyond human computer interaction |
|
| 05:13 | reality and so on. Ah, applications and security and surveillance, of |
|
| 05:19 | . Ah, you know, because you can imagine in public safety |
|
| 05:23 | , there is a need to try understand how objects move potentially identify |
|
| 05:30 | collide with each other things like, know, traffic accidents and so |
|
| 05:33 | so forth. Ah, and at same time, there might be applications |
|
| 05:39 | relate to security Being able to, , you know, clack a |
|
| 05:45 | for example. You know, if were to, um, you |
|
| 05:51 | get into a public fight, you have to be able to tease out |
|
| 05:56 | are the people involved where they move maybe before or after a particular |
|
| 06:03 | People Teoh identify directions in which there may have traversed, store or |
|
| 06:09 | and so on so forth. So are broad range of applications for |
|
| 06:15 | um, in already off scenarios now day the court affect right? I |
|
| 06:24 | , we have to understand, from computer vision standpoint, what is striking |
|
| 06:29 | was really supposed to do, So in a very simple sense, |
|
| 06:35 | idea is that, given an input , right, if you have a |
|
| 06:39 | , uh, let's say for sea this, people walking down tracking has |
|
| 06:46 | essentially be able to tell us there the objects of interest in this case |
|
| 06:53 | , uh, at the cutter And, of course, it has |
|
| 06:57 | be able to tell us what is particular trajectory off those objects prior to |
|
| 07:06 | current time. Right? So it's important that a tracking elegant of them |
|
| 07:12 | its core be able to deliver two of information, which is the current |
|
| 07:17 | for objects of interest and how they to that current position over time. |
|
| 07:24 | ? So that's that's really what we're Teoh build or design in an Alberta |
|
| 07:30 | when we talk about a tracking are tracking out. So let's look |
|
| 07:35 | this problem on break it down into the elements Ah, that may be |
|
| 07:43 | for us to think about when we about a tracking Al, right? |
|
| 07:47 | let's look at a cell for, know, sort of Ah, |
|
| 07:52 | Ah scenario. Let's say you you have a whole way the person |
|
| 07:59 | you're interested in tracking and that's the person in the scene for now. |
|
| 08:03 | , so first and foremost, of , we want to be able to |
|
| 08:08 | the object of interest. Now, know, we've been talking about |
|
| 08:13 | detectors for the pastor. You I guess a few lectures eso you |
|
| 08:20 | how to try to go ahead and a detector. In this context, |
|
| 08:24 | talking about a person detectors so we do that. And we know the |
|
| 08:28 | will give us a bounding box around person. Now, of course, |
|
| 08:31 | know, we want to be able think about tracking where tracking tells is |
|
| 08:37 | position of the object we're interested So you know we can You can |
|
| 08:42 | about a position in two D. can pick any any position. Let's |
|
| 08:47 | we pick the position that the, know, on the lower edge of |
|
| 08:53 | bounding box, maybe the center one pick any other position could be the |
|
| 08:57 | right off this object. A but the central of the Barney box |
|
| 09:02 | be picked as the position. But in this example use this particular |
|
| 09:06 | the one as the position of the product. So now it At some |
|
| 09:13 | after that position, the object will mood and will appear in a different |
|
| 09:19 | . Now we can basically do our again on the particular image, and |
|
| 09:24 | get abounding walks. And similarly, know, we find the center off |
|
| 09:29 | lower edge of the Barney marks and us a new position. Let's say |
|
| 09:33 | T So piece of tea is our position. Great. So now we're |
|
| 09:38 | to actually just apply our detector over over again to be able to identify |
|
| 09:45 | object that we want to localize and detection. It gives us the position |
|
| 09:51 | the object. Ah, and of , Ah, Now, if I |
|
| 09:56 | all dispositions in time, I will up getting a trajectory. So in |
|
| 10:01 | baby, my tracking problem is solved it gave me the position of the |
|
| 10:08 | in every image. Give me on to connect all dispositions and essentially come |
|
| 10:15 | with. Ah, a temporal evolution points, Which tells me how that |
|
| 10:21 | object came to its current position in present time. Right now. In |
|
| 10:26 | case, of course. Ah, know, detection is what I'm |
|
| 10:30 | So we can call the striking by kind. Of course, all we |
|
| 10:34 | have is the bottle that we used while building our detector. Ah, |
|
| 10:42 | let's say you know, we be , for example, the shape you |
|
| 10:46 | , we could have used, uh , everything that you talked about so |
|
| 10:51 | , right? Hard descriptors are hard . Any one of those is what |
|
| 10:57 | could have used in our design, detector. But at the end, |
|
| 11:01 | end up being able to do uh, tracking on, in this |
|
| 11:06 | , tracking bad detection because that's all doing now, of course, as |
|
| 11:11 | know, um, you know, are not perfect. One of the |
|
| 11:16 | that we, uh, have talked is the fact that, you |
|
| 11:20 | detectors can produce false detections. So say Ah, for whatever reason, |
|
| 11:29 | , we come back to our simple . Single person in the scene. |
|
| 11:34 | doing our detection. We detected the at disposition Piece of wanted at the |
|
| 11:40 | , we have the person moving. at some point in time, let's |
|
| 11:46 | time, Step K. We got false detection from our detector, and |
|
| 11:51 | ended up finding this particular bounding box on, Of course, because we |
|
| 11:56 | a bounding box, we assume we you know, since you're not see |
|
| 12:01 | visualize ing every detection, we assume the defections are correct. We get |
|
| 12:05 | detection and of course, we get location of the bounding box. |
|
| 12:10 | the consistent way that he chose and call it Piece of cake. |
|
| 12:15 | of course, if I, you know, I'm simply creating the |
|
| 12:19 | by connecting all these points. The Lee I will get is sort off |
|
| 12:24 | I'm showing here. Um, so have, ah, evolution of the |
|
| 12:29 | with all these points were potentially one the points is not quite correct. |
|
| 12:36 | this can be problematic, because now don't necessarily have the correct trajectory re |
|
| 12:41 | . There are trajectory. The other that detectors is of course, you |
|
| 12:47 | , if we are unable to actually the object very well for various |
|
| 12:53 | One of them, ah, being obvious one, which is the object |
|
| 12:57 | occluded. So in this example, say there are objects in front and |
|
| 13:00 | can't quite see the object of interest person in our detection completing fields. |
|
| 13:07 | if that happens like that at a time point, we will simply not |
|
| 13:12 | any detection. Um, so both these issues related to detectors can kind |
|
| 13:22 | be problematic, right? One is detections. The others. Ah, |
|
| 13:27 | . And in either case, we not necessarily be able to get a |
|
| 13:32 | trajectory, and as a result, tracking solution is not quite to the |
|
| 13:40 | that be made desire. Now, course, there are other problems with |
|
| 13:44 | object detections, you know, cause , for example, of you talked |
|
| 13:49 | this rare once we train a Typically our training is is made up |
|
| 13:56 | example er images. And if exemplar don't capture all the potential variations that |
|
| 14:02 | might encounter Ah, during testing our detector may not quite toe work |
|
| 14:08 | well, right? And of when we're talking about moving objects, |
|
| 14:12 | gonna be a lot of aviation's posed elimination radiations could be Could be two |
|
| 14:19 | types. There could be others. in either case Ah, you |
|
| 14:22 | detection may or may not be quite par. And as that translates |
|
| 14:28 | ah, the accuracy of tracking as . Now the other thing is, |
|
| 14:35 | course, when we have multiple objects the seat, right. So let's |
|
| 14:39 | instead of having one person that be tracking now we have two people that |
|
| 14:44 | tracking. Okay, we can still our detection. And of course, |
|
| 14:49 | we do that, we'll end up two detections. Right? So we'll |
|
| 14:52 | to bounding boxes because they're two people the scene and of course, |
|
| 14:57 | we have at some point in as the Two Objects movie have grasped |
|
| 15:04 | detection belongs to which object, So rich detection would belong to which |
|
| 15:10 | in this case. So the idea piecing this out when we have multiple |
|
| 15:16 | in the scene and making sure that associate the correct detection at each time |
|
| 15:23 | . So the correct object that be tracking This problem is called data |
|
| 15:28 | right? So we have to know , rich observations are our measurements were |
|
| 15:34 | go with which particular I d often that we're tracking. Now, this |
|
| 15:41 | be quite uninterested. Problem, And typically data association. One way |
|
| 15:49 | think about us that maybe if I , um you know, I kind |
|
| 15:54 | know a little bit more about the that I'm tracking. Uh, maybe |
|
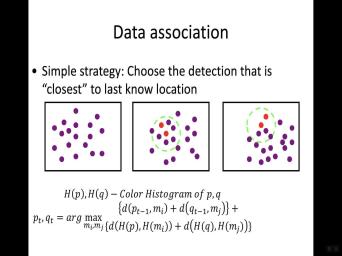
| 15:59 | additional information can help me solve the association problem. Right. So let's |
|
| 16:05 | a simplest strategy that they can apply that maybe as we get every new |
|
| 16:11 | , remember, For every new we are computing the current position off |
|
| 16:17 | particular object. So one simple we're did association is to say that why |
|
| 16:23 | assigned the current detection? We have the i d for which the location |
|
| 16:34 | the current detection is as close as to the location off the previous |
|
| 16:40 | Right. So this would be a simple strategy of saying, choose the |
|
| 16:45 | that is close us to the last . Okay, So if for |
|
| 16:52 | I have ah, detection, you know, let's say you |
|
| 16:59 | I'm tracking the red dot right? I end up seeing two detections. |
|
| 17:05 | of these purple dots. The question , which one is the red I |
|
| 17:12 | And you can say Well, you , let me look at the distance |
|
| 17:16 | the red and this purple dark and red and this purple dark and |
|
| 17:21 | this seems to be the closest the are that this is a purple |
|
| 17:25 | Exactly the same has the red dot d and I make those two association's |
|
| 17:32 | so that that's the idea. So be essentially end up doing that. |
|
| 17:37 | say they have the two objects, know, we find their locations that |
|
| 17:42 | detect and the object booze. You , we'll end up finding to new |
|
| 17:47 | boxes and, of course, the location of the object. And I |
|
| 17:51 | , Well, you know, obviously I look at this this blue dot |
|
| 17:56 | this late daughter closer to each other to this blue in this lead and |
|
| 18:00 | same for this So you know, two should be associated together belonging to |
|
| 18:06 | same object. Great on that kind works off course. Ah ah, |
|
| 18:13 | to think about that, you in the formulation is that you |
|
| 18:16 | if I have UH, two P and Q. Okay, And |
|
| 18:22 | course, I am creating the trajectories time. So p one teau p |
|
| 18:27 | T minus one is the trajectory of . P. Q. One to |
|
| 18:32 | T minus Juan is the trajectory of . Q. Sorry, this should |
|
| 18:36 | cute. And then I get to directions in one attempt to on. |
|
| 18:41 | gonna do the Data association for computing of T and Q sub team to |
|
| 18:48 | equal to the minimum. Off the off P of T minus one |
|
| 18:56 | Am I plus the distance off Q minus one MJ, right. So |
|
| 19:03 | I. For all all possible choices . Am I and M J that |
|
| 19:07 | have. I have to compute this off distances and the one that is |
|
| 19:13 | smallest should be the correct value for minus one. Q T off minus |
|
| 19:20 | in order to get the next Okay, that's the idea. Of |
|
| 19:25 | , this will only hold true if do the closest distance association now off |
|
| 19:31 | , This kind of works well. , you know, be generally do |
|
| 19:36 | know what we're not accounted for. the objects are moving. So what |
|
| 19:41 | if the two objects that were trying detect tend to sort of say that |
|
| 19:47 | moving essentially in a way that they come closer to each other? |
|
| 19:53 | So? So if both of them taboo sort of towards the center location |
|
| 19:57 | to the two of them, we end up saying getting to detections at |
|
| 20:02 | next time point that are very close each other. Now this, then |
|
| 20:05 | comes lock tougher, right? um, the distances Ah, for |
|
| 20:12 | the previous position. And the next can become very, very similar. |
|
| 20:19 | . Off which association be, you , sort of which radar be associate |
|
| 20:26 | the rich blue dot Right. Eso may not give us a good |
|
| 20:31 | So, um, this strategy off the closest location may not necessarily translate |
|
| 20:40 | in all applications. No, imagine we had some more information that we |
|
| 20:48 | leverage. Right. So as we're the two objects, the two people |
|
| 20:53 | this case let's say that one of objects is actually bearing, or the |
|
| 21:00 | of the object is different between the objects that we're looking at, |
|
| 21:05 | So in the simple example, you , given, given this this person |
|
| 21:11 | , colored shared compared to this person , as we saw try to solve |
|
| 21:17 | state association problem. What if we were to look at our detection results |
|
| 21:23 | say that well, rather than just the bounding box with one indicator, |
|
| 21:29 | is the position of the burning How about during the later association? |
|
| 21:35 | also use the information that we have the object within the bounding box? |
|
| 21:41 | ? So one example would be to , Why not compute the color |
|
| 21:45 | Graham. Let's say off the pixels the bounding box and use color history |
|
| 21:52 | as a representation off the appearance off object. Great. Now, if |
|
| 21:57 | news that, then we can say my deed association problem can we now |
|
| 22:04 | as not only solving for association by the closest distance off the previous object |
|
| 22:15 | to the new object position, but by maximizing good match off the color |
|
| 22:24 | off pixels within the bounding box off detected object. So let's say the |
|
| 22:31 | color history grams for each of P each of Q R color Instagrams for |
|
| 22:37 | two objects. P and Q. of course, what I want to |
|
| 22:40 | is to match not only the distance , you know, between Ah PT |
|
| 22:49 | one and the new detection. Am and Q T minus one in the |
|
| 22:53 | MJ. But I also want to the distance. Uh, that I'm |
|
| 23:01 | for the history Graham off p instagram am I blessed instagram of Q on |
|
| 23:09 | A for him, Jay. So we want to make sure that |
|
| 23:11 | similarity between the history Grams doing data or maximum strikes and we have one |
|
| 23:17 | the stroke itself information now that being so are me an association based on |
|
| 23:24 | Israelis color match. No, this be quite interesting. Of course, |
|
| 23:31 | still left with the issue off a and false alarms when we're during |
|
| 23:36 | Right? So we talked about this , so I'm a potentially get a |
|
| 23:40 | production, and I may actually not able to observe one of the objects |
|
| 23:45 | one particular friend. Great. I mean the skin stilyan issue, |
|
| 23:51 | we have some robustness in the sense on doing data association and it is |
|
| 23:57 | step to make sure that our tracking you know, more robust algorithms right |
|
| 24:07 | . Of course. Um, what kind of information can be news than |
|
| 24:13 | attracting objects? Well, since we're objects, you actually know Stempel |
|
| 24:20 | The different positions the object has taken time. Now there's the object is |
|
| 24:27 | moving in space. Potentially, we ability to compute the velocity at which |
|
| 24:35 | object is moving. So if I that the object is is it a |
|
| 24:41 | location at let's 18 subzero then of , the object Each of them will |
|
| 24:48 | some velocity with which they will move as a result, potentially come to |
|
| 24:54 | new position at a next time. right. So the velocity, let's |
|
| 24:59 | it. But with the vector V now, of course, if I |
|
| 25:04 | that Vector V, then I have ability to kind of know where the |
|
| 25:10 | will be at a time except say right, going from 0 to |
|
| 25:15 | And the way I can know that estimate that is simply by solving, |
|
| 25:21 | , the simple equation where we know velocity is just a change in position |
|
| 25:27 | time Eso I can lead. I say it will be one which is |
|
| 25:32 | position of time 0.1 building close to position of zero by position at |
|
| 25:40 | You know, plus t one minus 0 13 multiplied by the velocity. |
|
| 25:47 | so this gives me an ability to of know bear, the object will |
|
| 25:52 | at time pointy one. Well, is great. Now, if I |
|
| 25:57 | this, then I don't actually have search my end that image for potentially |
|
| 26:05 | the object is. It actually gives a more bounded search space to |
|
| 26:11 | Hey, look for the object. , Within this area off the image |
|
| 26:17 | said this is helpful because it will help reduce the false detections that I |
|
| 26:24 | be getting from my detect. So a more confined search space can help |
|
| 26:30 | eliminate false protections and as a of course, held and improve our |
|
| 26:36 | accuracy. Do we get better were able to do better data |
|
| 26:41 | and as a result, hopefully do better job of track in a |
|
| 26:46 | As I do this, I can updating not only the position of the |
|
| 26:53 | . But now, if I know where the object is by doing a |
|
| 26:58 | job of detective addiction, I can use the new location to go back |
|
| 27:04 | update my velocity information about the So I have a better idea on |
|
| 27:10 | to predict its next location. So we have a dig, a strategy |
|
| 27:17 | data association strategy that potentially is becoming and more powerful, which has been |
|
| 27:24 | only just doing association but proximity, doing association by appearance rate. So |
|
| 27:30 | a matching colors could be other features well that we can use, but |
|
| 27:35 | way off matching information that we extract the pixels within the bounding box of |
|
| 27:41 | detective object. And then, of , Ah, you know. Now |
|
| 27:45 | are also saying that they are going improve our did association by using |
|
| 27:53 | right? So by not only the point match, but using the prediction |
|
| 28:01 | saying what is the closest detection to predicted location? Are there that object |
|
| 28:10 | expected off beer based on the velocity that we have about the art? |
|
| 28:16 | , so this now becomes quite powerful in fact, using this they are |
|
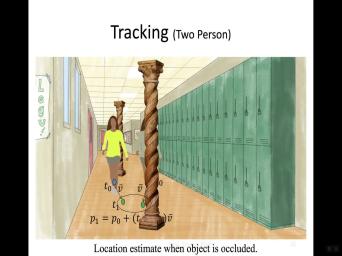
| 28:22 | did association. We may even be to deal with partial exclusions or temporary |
|
| 28:34 | Zoff objects. So let's say we unable to detect an object at one |
|
| 28:39 | time point. But I can still able to predict potentially where that object |
|
| 28:47 | appear at the next time point. my velocity information, I may be |
|
| 28:54 | to continue doing prediction. Using the known velocity and previously known position often |
|
| 29:03 | even in the case when an object to be detected by the detector at |
|
| 29:09 | particular time point. So this becomes even more robots straight. So here's |
|
| 29:15 | example. Right again, we're using quite simple. We are looking at |
|
| 29:22 | color information off this particular ball in example. But if you think about |
|
| 29:28 | , we are able to actually track continue tracking the ball, even burn |
|
| 29:33 | ball actually goes outside off the frame observation. Right. So this is |
|
| 29:42 | is a simple example of how we do tracking by detection, uh, |
|
| 29:47 | some simple strategies. Okay, no, if you think about |
|
| 29:51 | are tracking algorithm as you ward We are using one sort off the |
|
| 29:58 | detection, right. Some kind of shape information over the object of |
|
| 30:03 | We're using the appearance. That's a information or color history Graham off the |
|
| 30:08 | within the bounding box. And then also using the dynamics whore some motion |
|
| 30:16 | about the object in order to continue with objects successfully. Right? So |
|
| 30:23 | using multiple types of information in order solar tracking problem. Okay, so |
|
| 30:30 | , tracking Bye bye. Um, this information gives us a much more |
|
| 30:36 | a solution to doing tracking. of course, keeping moment. Some |
|
| 30:42 | this is based on prediction rates are is based on our understanding off the |
|
| 30:49 | of an object. And prediction um is our model and using detection |
|
| 30:58 | is a really for the still verified our model is telling us by essentially |
|
| 31:07 | what is happening in the space. we're gonna be had these two objects |
|
| 31:11 | the scene. The objects are at particular location. A time 0.0. |
|
| 31:17 | . So that's it is blue Of course, we have our |
|
| 31:21 | And based on the velocity, we predict there, that object will be |
|
| 31:25 | time 0.1, but at the same , given an image that we get |
|
| 31:32 | time 0.1, we have our detector our detector gives us an estimate of |
|
| 31:37 | bounding box off where the object And given that bounding box, we |
|
| 31:42 | a better estimate of their exactly that is so the yellow dots signify the |
|
| 31:48 | position. Right now, once we all three, we actually also have |
|
| 31:55 | ability to know potentially what are detection is or what our prediction. That's |
|
| 32:02 | . And that's given by the difference the green dark and the yellow |
|
| 32:07 | So the difference in the prediction and is important. Tees off information that |
|
| 32:12 | need to account for is we kind get ready to apply are tracking framework |
|
| 32:19 | the next time point. So we to do some correction when we are |
|
| 32:25 | using dynamics for tracking. So here's base case. Let's assume that we |
|
| 32:31 | some initial prior that predicts that state the absence of any of its rights |
|
| 32:35 | your no observation as yet, But course we are inst enshi ating, |
|
| 32:42 | you will, a couple variables that us information about the object now? |
|
| 32:47 | course. What are those variables? , in this simple example, we're |
|
| 32:51 | about the position in the velocity off object that we're interested in tracking |
|
| 32:57 | Tell us what? Is the state the object? No. When we |
|
| 33:03 | the first frame, we have our observation, right? And the minute |
|
| 33:08 | ever observation, we don't our We actually get the correct opposition off |
|
| 33:14 | objects were given. Ah, some . And for ritually actually have what |
|
| 33:20 | consider to be the correct value. we given the correct value and give |
|
| 33:26 | our ability to predict that value gives now an ability to correct our estimate |
|
| 33:35 | the given time point. Right? given something that we actually have |
|
| 33:40 | we can now use that information to something in the future. Off course |
|
| 33:46 | in the future, when the future present, right? So we have |
|
| 33:49 | observation. A time 10 point, one. They can now have the |
|
| 33:54 | to correct our information and then predict time point D plus two. And |
|
| 33:59 | keep repeating this process forward and over now. So let's come back to |
|
| 34:07 | looking at this and thinking about this a very, very simple sort of |
|
| 34:11 | model system that said, We have ball that were instruments train tracking the |
|
| 34:17 | . Is that position eg zero. we said that, you know, |
|
| 34:21 | gonna move with velocity, the zero constant velocity. Okay, So based |
|
| 34:26 | that, we certainly can predict where ball will be at time point except |
|
| 34:32 | . So at time 10.1, it'll a position acceptance. Here's the predicted |
|
| 34:38 | . Now, of course, Ben . One happens, we say. |
|
| 34:44 | , great. Now I have some , and I expect it to be |
|
| 34:49 | disposition when I concert within that and OK, let me find it. |
|
| 34:53 | , okay. Turns out I found the ball at this location by someone |
|
| 34:59 | this becomes my measurement now, of , given my measurement, I need |
|
| 35:03 | somehow correct. You know what I've and sign to. Thanks. My |
|
| 35:09 | . Extra one and my observation. one right. So which one is |
|
| 35:14 | ? I have to somehow reconciling That an ex wonder. Why one of |
|
| 35:19 | . If if I don't correct, will end up, sort of drifting |
|
| 35:26 | eventually lose track of where the ball . Right? So I hope you |
|
| 35:31 | a way of correcting what this is and the idea of doing this correction |
|
| 35:36 | proposed Ah ah in a free work the mechanism first back in the 19 |
|
| 35:43 | by Hari Coleman and they if he apply what he proposed. Uh, |
|
| 35:51 | know, this is confined within the of what we call the Kalman |
|
| 35:55 | It's a It's a simple recursive data Albert that was proposed. And the |
|
| 36:01 | is to generate optimal estimate off the states of the quantities, given a |
|
| 36:07 | off measurements, given a set of right now, optimal in what |
|
| 36:12 | Well, optimal in a linear system which is we're talking about state variables |
|
| 36:18 | can be predicted, uh, within linear framework based on observations. |
|
| 36:26 | of course, it's recursive in the that does it acquitted process. The |
|
| 36:31 | values are updated after every measurement is . OK, and we'll look at |
|
| 36:36 | in the context off our tracking So let's come back to our simple |
|
| 36:42 | problem, right? Tracking a We have all we have the |
|
| 36:47 | eg zero. And we have a V zero. Okay, now, |
|
| 36:52 | course, this is our initialization at zero. And we will also have |
|
| 36:57 | we call a measurement are Sorry. estimation error. Right. So we |
|
| 37:04 | call that e estimate Time 00.0. estimation error. And similarly, we |
|
| 37:09 | . Instead, she ate another quantity the measurement better, which is any |
|
| 37:15 | . Okay, now, EG zero zero are our state variables. So |
|
| 37:20 | gonna happen is that let's say the this time point remind a swan the |
|
| 37:27 | that our ball was at some position e minus one. And it got |
|
| 37:33 | a point, except at time T its velocity v zero and off course |
|
| 37:43 | . In doing this estimation, we an estimation error from nine point B |
|
| 37:49 | one, and this estimation enter. , is, you know, that's |
|
| 37:55 | rough estimate. Time point, t one. Now, remember, our |
|
| 37:59 | model is very simple. Italy, model. It says that X will |
|
| 38:04 | at point. It's all your Pointy. It will be an extra |
|
| 38:09 | , which is nothing but its evolution accepting minus one it's being this position |
|
| 38:15 | the belt rt the time difference Multiplied by the velocity, the |
|
| 38:22 | Now, of course, at time , we're going to search, but |
|
| 38:26 | the vicinity are estimated point. And say my observation tells me that the |
|
| 38:32 | is that Why septic? Now, order to apply Kalman filter to the |
|
| 38:39 | problem that are three steps that beer actually talk about your address. First |
|
| 38:43 | foremost were compute what is called a on gay Kalman. Gain is signified |
|
| 38:49 | or denoted by key sub G, it's equal to the ratio off the |
|
| 38:57 | error at the previous time point divided that estimation error plus ni measurement. |
|
| 39:05 | , now what does really tells us that in general, the value off |
|
| 39:12 | G is going to be between zero one and off course. If the |
|
| 39:18 | estimation error is actually zero, then Kalman gain is same as you. |
|
| 39:25 | police going zero divided by some corn matter to you. On the other |
|
| 39:30 | of the estimation, error is actually greater than our measurement error. Then |
|
| 39:35 | Kalman gain actually approaches close to Okay, the destination error from the |
|
| 39:41 | . Time step is is much larger the measurement error. Then Kalman gain |
|
| 39:47 | be approximately one. Now, once compute the Kalman gain, the really |
|
| 39:56 | for the position estimate for the which is X. Its position at |
|
| 40:03 | Point team is basically reconciling between our at wife's empty and our predicted position |
|
| 40:14 | times that right, which is p t. Which is predicted and |
|
| 40:20 | . Subtitles are measurement. So the consol those is the X predicted a |
|
| 40:27 | point, plus the difference off the position right and that the predicted position |
|
| 40:36 | by the Coleman game. So what this do? It does a couple |
|
| 40:41 | one. Remember if our estimation error the previous step is basically zero |
|
| 40:47 | So, in which case, the Kane is zero. In which |
|
| 40:50 | of course, our predicted point is the same is our actual point at |
|
| 41:00 | , teeth right, which basically says if my estimation is so good, |
|
| 41:04 | I don't need to worry about my being different than my production. |
|
| 41:11 | So my prediction is the correcting. the other hand, if my estimation |
|
| 41:17 | is actually much larger than my measurement . Then Coleman Gina's equals one. |
|
| 41:24 | which case we're saying that well, know, I should really rely on |
|
| 41:29 | measurement rather than my estimation, because estimation error has been large. |
|
| 41:36 | of course, if it's in between two, you come up with some |
|
| 41:41 | off senior combination of the predicted in observed point, and you'll generally lie |
|
| 41:47 | between the predicted and observed points. we might get a correction, which |
|
| 41:52 | us that this might be the actual position off the ball at time |
|
| 41:58 | Okay, you know, of once we have resolved this, the |
|
| 42:03 | step is to compute the new Error on the new estimation error is |
|
| 42:10 | given by one minus the Kalman gain by the previous estimation. So this |
|
| 42:17 | how the updated on estimation error and repeat this process over in order |
|
| 42:23 | So common filter actually is very, simple on at the same time very |
|
| 42:29 | in addressing the tracking problem, So it requires prediction. Step, |
|
| 42:36 | is the previous position, plus dealt multiplied by the velocity, gives us |
|
| 42:42 | predicted position of course, once we that, we actually, once we |
|
| 42:47 | a measurement at Time Point T. , update the necessary elements of Kalman |
|
| 42:53 | , which is the Kalman gain. actual position estimate at nine point |
|
| 43:02 | And of course, the new estimate our in our, uh, time |
|
| 43:08 | . And use these quantities now to ahead and go back to your prediction |
|
| 43:14 | the next time point. And we repeating this process. So this is |
|
| 43:18 | Kalman filter is on bits used extensively simple tracking problems and especially in the |
|
| 43:27 | where the dynamics of the object we're Ah, our senior, this is |
|
| 43:34 | important to keep in mind that the of the object be attracting have to |
|
| 43:38 | linear in the context off applying the Kalman filter. All right, so |
|
| 43:46 | don't we stop here for today? , and we'll continue our discussion next |
|
| 43:52 | in terms of looking at some of other elements that are necessary also. |
|
| 43:58 | , are it's not not that they're , but they're also utilize quite extensively |
|
| 44:03 | Zoe. Think about how we address tracking problem in the context of computer |
|
| 44:08 | applications. All right, but that will stop here for the day. |
|
| 44:14 | |
|